
برنامه ریزی حرکت ( نام دیگر، «مشکل ناوبری»، مسئله «حرکت دهنده پیانو» ) اصطلاحی است که در رباتیک به فرایند جزئی سازی کاری، درقالب حرکت های جداگانه و گسسته گفته می شود. به عنوان مثال، هدایت رباتی سیار در داخل یک ساختمان به سمت هدفی دور را، در حالی که باید از دیوارها بدون برخورد عبور کند و مراقب پایین افتادن از پله ها باشد، در نظر بگیرید. الگوریتم برنامه ریزی حرکت این وظایف جداگانه را به عنوان ورودی می گیرد، فرمان سرعت و چرخش چرخ ها را تولید می کند و به ربات ارسال می کند. الگوریتم های برنامه ریزی حرکت ربات ممکن است با تعداد بیشتری از مفاصل ( به عنوان مثال بازوهای صنعتی ) ، وظایفی پیچیده تر ( به عنوان مثال دستکاری اشیاء ) ، محدودیت های مختلف ( به عنوان مثال یک ماشین که فقط به جلو می تواند برود ) ، و عدم قطعیت ( به عنوان مثال مدل ناقص محیط یا ربات ) روبرو باشند.
برنامه ریزی حرکت دارای کاربردهای رباتیکی زیادی از قبیل خودمختاری، خودکارسازی، نرم افزار طراحی به وسیله کامپیوتر و نیز برنامه های کاربردی در زمینه های دیگر مانند پویانمایی شخصیت های دیجیتال، طراحی معماری، جراحی رباتیک و مطالعه مولکول های زیستی می باشد.
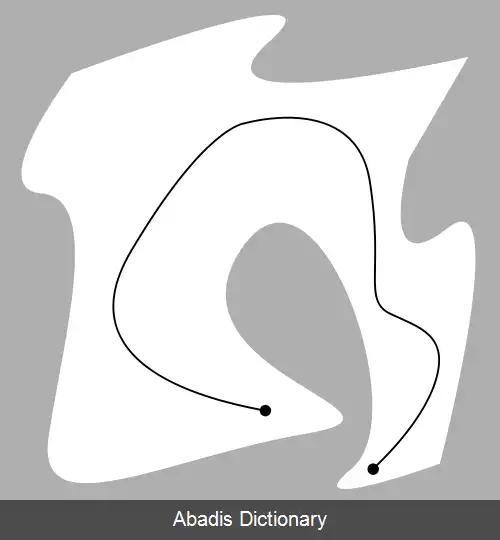
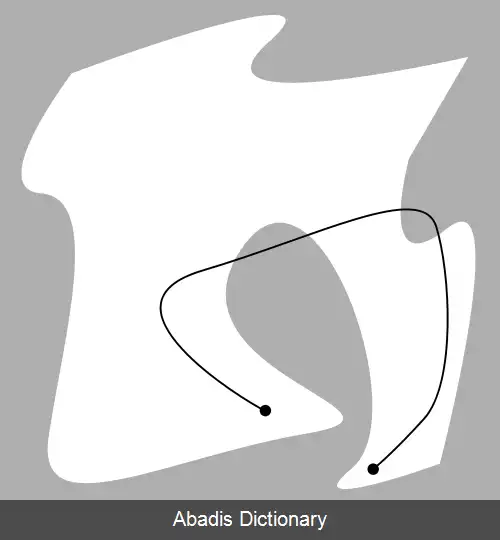
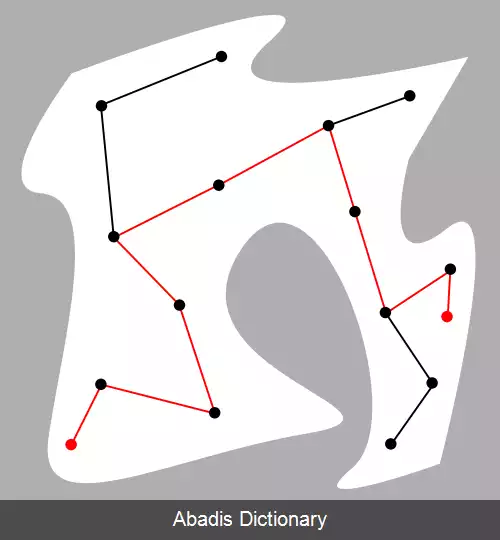
مسئلهٔ اصلی برنامه ریزی حرکت، تولید یک حرکت مداوم است که پیکربندی شروع S را به پیکربندی هدف G متصل کند، در حالی که از برخورد با موانع شناخته شده اجتناب کند. هندسهٔ ربات و موانع، در فضای کاری ۲ یا ۳ بعدی تعریف می شود. در حالی که حرکت، به عنوان یک مسیر ( احتمالاً در ابعاد بالاتر ) در فضای پیکربندی تعریف می شود.
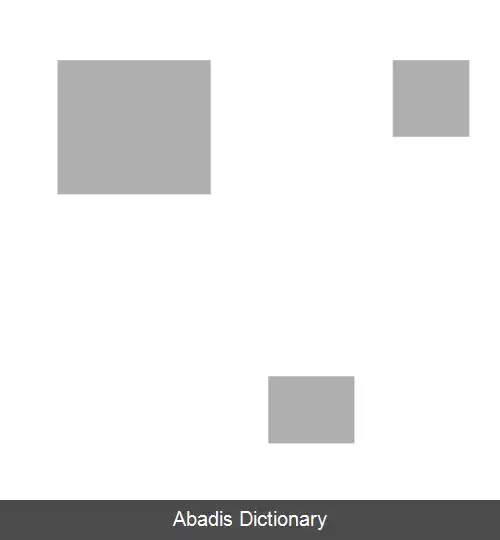
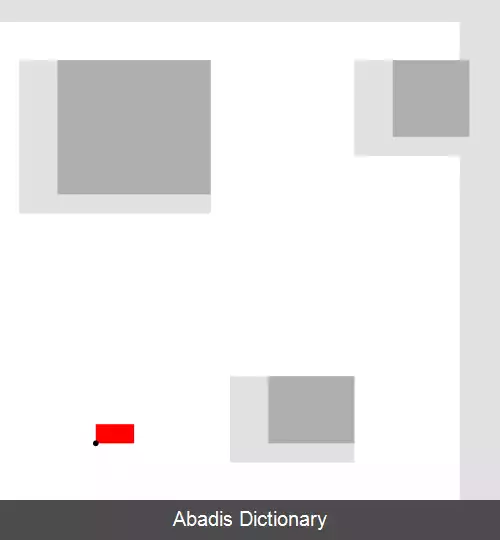
یک پیکربندی، مکان روبات را تشریح می کند و فضای پیکربندی C، مجموعهٔ تمام پیکربندی های ممکن آن ( تمام نقاطی که روبات امکان دستیابی به آن ها را دارد ) می باشد. برای مثال:
• اگر ربات یک نقطه ( بااندازه صفر ) در صفحه ۲ بعدی باشد ( فضای کار ) ، C یک صفحه می باشد و پیکربندی می تواند با استفاده از دو پارامتر ( x, y ) بیان شود.
• اگر ربات شی ای ۲بعدی باشد و بتواند حرکت و چرخش کند، فضای کار هنوز ۲ بعدی محسوب می شود با این حال، C گروه اقلیدسی خاصی به شرح زیر است: S E ( 2 ) = R 2 ∗ S O ( 2 ) {\displaystyle SE ( 2 ) =R^{2}*SO ( 2 ) } ( که ( S0 ( 2 یک گروه متعامد خاص، از حرکت های دوبعدی می باشد ) واین پیکربندی می تواند با ۳ پارامتر ( x, y, θ ) نمایش داده شود.
• اگر ربات جسمی ۳ بعدی باشد که می تواند حرکت و چرخش کند، فضای کار ۳ بعدی است. اما C گروه اقلیدسی خاصی به شرح زیر است: S E ( 3 ) = R 3 ∗ S O ( 3 ) {\displaystyle SE ( 3 ) =R^{3}*SO ( 3 ) }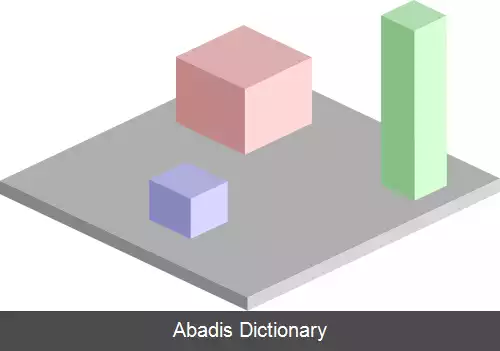
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفبرنامه ریزی حرکت دارای کاربردهای رباتیکی زیادی از قبیل خودمختاری، خودکارسازی، نرم افزار طراحی به وسیله کامپیوتر و نیز برنامه های کاربردی در زمینه های دیگر مانند پویانمایی شخصیت های دیجیتال، طراحی معماری، جراحی رباتیک و مطالعه مولکول های زیستی می باشد.
مسئلهٔ اصلی برنامه ریزی حرکت، تولید یک حرکت مداوم است که پیکربندی شروع S را به پیکربندی هدف G متصل کند، در حالی که از برخورد با موانع شناخته شده اجتناب کند. هندسهٔ ربات و موانع، در فضای کاری ۲ یا ۳ بعدی تعریف می شود. در حالی که حرکت، به عنوان یک مسیر ( احتمالاً در ابعاد بالاتر ) در فضای پیکربندی تعریف می شود.
یک پیکربندی، مکان روبات را تشریح می کند و فضای پیکربندی C، مجموعهٔ تمام پیکربندی های ممکن آن ( تمام نقاطی که روبات امکان دستیابی به آن ها را دارد ) می باشد. برای مثال:
• اگر ربات یک نقطه ( بااندازه صفر ) در صفحه ۲ بعدی باشد ( فضای کار ) ، C یک صفحه می باشد و پیکربندی می تواند با استفاده از دو پارامتر ( x, y ) بیان شود.
• اگر ربات شی ای ۲بعدی باشد و بتواند حرکت و چرخش کند، فضای کار هنوز ۲ بعدی محسوب می شود با این حال، C گروه اقلیدسی خاصی به شرح زیر است: S E ( 2 ) = R 2 ∗ S O ( 2 ) {\displaystyle SE ( 2 ) =R^{2}*SO ( 2 ) } ( که ( S0 ( 2 یک گروه متعامد خاص، از حرکت های دوبعدی می باشد ) واین پیکربندی می تواند با ۳ پارامتر ( x, y, θ ) نمایش داده شود.
• اگر ربات جسمی ۳ بعدی باشد که می تواند حرکت و چرخش کند، فضای کار ۳ بعدی است. اما C گروه اقلیدسی خاصی به شرح زیر است: S E ( 3 ) = R 3 ∗ S O ( 3 ) {\displaystyle SE ( 3 ) =R^{3}*SO ( 3 ) }






wiki: برنامه ریزی حرکت