
سامانهٔ ناوبری اینرسیایی ( INS ) یک دستگاه ناوبری است که از رایانه، حسگرهای حرکت ( شتاب سنج ) و سنسورهای چرخش ( ژیروسکوپ ) برای محاسبه مداوم موقعیت، جهت و سرعت ( جهت و سرعت حرکت ) یک جسم متحرک بدون نیاز به مرجعی خارجی استفاده می کند. [ ۱] اغلب حسگرهای اینرسیایی توسط یک ارتفاع سنج بارومتریک و گاهی توسط حسگرهای مغناطیسی ( مغناطیس سنج ) و/یا دستگاه های اندازه گیری سرعت، تکمیل می شوند. این سامانه، در رُبات های متحرک و در وسایل نقلیه مانند کشتی ها، هواپیماها، زیردریایی ها، موشک های هدایت شونده و فضاپیماها استفاده می شود. [ ۲]
ناوبری اینرسیایی یک تکنیک ناوبری مستقل است که در آن از اندازه گیری های ارائه شده توسط شتاب سنج ها و ژیروسکوپ ها برای ردیابی موقعیت و جهت یک جسم، نسبت به نقطهٔ شروع، جهت و سرعت محاسبه شده استفاده می شود. دستگاه های اندازه گیری اینرسی ( IMU ) معمولاً شامل سه ژیروسکوپ نرخ متعامد و سه شتاب سنج متعامد هستند که به ترتیب، سرعت زاویه ای و شتاب خطی را اندازه گیری می کنند. با پردازش سیگنال های این دستگاه ها می توان موقعیت و جهت یک دستگاه را ردیابی کرد.
ناوبری اینرسیایی در طیف گسترده ای از کاربردها از جمله ناوبری هواپیما، موشک های تاکتیکی و استراتژیک، فضاپیماها، زیردریایی ها و کشتی ها استفاده می شود. همچنین در برخی از تلفن های همراه، با هدف مکان یابی و ردیابی، تعبیه شده است. [ ۳] [ ۴] پیشرفت های اخیر در ساخت سامانه های میکروالکترومکانیکی ( MEMS ) امکان ساخت سیستم های ناوبری اینرسیایی کوچک و سبک را فراهم کرده است. این پیشرفت ها دامنهٔ کاربردهای ممکن را گسترش داده است تا زمینه هایی مانند ضبط حرکت انسان و حیوانات را در بر بگیرد.
یک سیستم ناوبری اینرسیایی، حداقل شامل یک کامپیوتر و یک پلت فرم یا ماژول حاوی شتاب سنج، ژیروسکوپ یا سایر دستگاه های حسگر حرکت است. این سامانه، در ابتدا با موقعیت و سرعت خود از منبع دیگری ( اپراتور انسانی، گیرندهٔ ماهواره جی پی اس و غیره ) همراه با جهت اولیه ارائه می شود و پس از آن، موقعیت و سرعت به روز شدهٔ خود را با یکپارچه سازی اطلاعات دریافتی از حسگرهای حرکت محاسبه می کند. مزیت یک INS این است که برای تعیین موقعیت، جهت یا سرعت آن پس از مقداردهی اولیه، به هیچ مرجع خارجی دیگری نیاز ندارد.
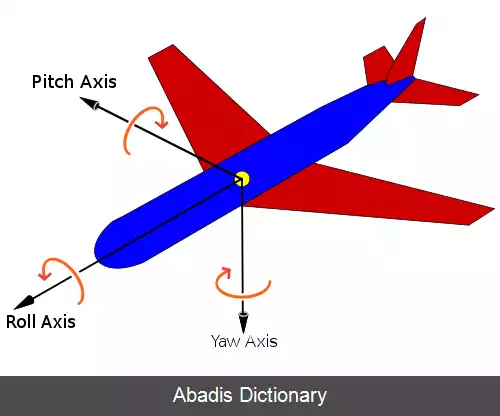
یک INS می تواند تغییر در موقعیت جغرافیایی خود ( مثلاً به سمت شرق یا شمال ) ، تغییر در سرعت ( سرعت و جهت حرکت ) و تغییر جهت آن ( چرخش حول یک محور ) را تشخیص دهد. این کار، با اندازه گیری شتاب خطی و سرعت زاویه ای اِعمال شده به سیستم انجام می گیرد. این سامانه، از آن جایی که به هیچ مرجع خارجی نیاز ندارد ( پس از مقداردهی اولیه ) ، از پارازیت و فریب مصون است.
این نوشته برگرفته از سایت ویکی پدیا می باشد، اگر نادرست یا توهین آمیز است، لطفا گزارش دهید: گزارش تخلفناوبری اینرسیایی یک تکنیک ناوبری مستقل است که در آن از اندازه گیری های ارائه شده توسط شتاب سنج ها و ژیروسکوپ ها برای ردیابی موقعیت و جهت یک جسم، نسبت به نقطهٔ شروع، جهت و سرعت محاسبه شده استفاده می شود. دستگاه های اندازه گیری اینرسی ( IMU ) معمولاً شامل سه ژیروسکوپ نرخ متعامد و سه شتاب سنج متعامد هستند که به ترتیب، سرعت زاویه ای و شتاب خطی را اندازه گیری می کنند. با پردازش سیگنال های این دستگاه ها می توان موقعیت و جهت یک دستگاه را ردیابی کرد.
ناوبری اینرسیایی در طیف گسترده ای از کاربردها از جمله ناوبری هواپیما، موشک های تاکتیکی و استراتژیک، فضاپیماها، زیردریایی ها و کشتی ها استفاده می شود. همچنین در برخی از تلفن های همراه، با هدف مکان یابی و ردیابی، تعبیه شده است. [ ۳] [ ۴] پیشرفت های اخیر در ساخت سامانه های میکروالکترومکانیکی ( MEMS ) امکان ساخت سیستم های ناوبری اینرسیایی کوچک و سبک را فراهم کرده است. این پیشرفت ها دامنهٔ کاربردهای ممکن را گسترش داده است تا زمینه هایی مانند ضبط حرکت انسان و حیوانات را در بر بگیرد.
یک سیستم ناوبری اینرسیایی، حداقل شامل یک کامپیوتر و یک پلت فرم یا ماژول حاوی شتاب سنج، ژیروسکوپ یا سایر دستگاه های حسگر حرکت است. این سامانه، در ابتدا با موقعیت و سرعت خود از منبع دیگری ( اپراتور انسانی، گیرندهٔ ماهواره جی پی اس و غیره ) همراه با جهت اولیه ارائه می شود و پس از آن، موقعیت و سرعت به روز شدهٔ خود را با یکپارچه سازی اطلاعات دریافتی از حسگرهای حرکت محاسبه می کند. مزیت یک INS این است که برای تعیین موقعیت، جهت یا سرعت آن پس از مقداردهی اولیه، به هیچ مرجع خارجی دیگری نیاز ندارد.
یک INS می تواند تغییر در موقعیت جغرافیایی خود ( مثلاً به سمت شرق یا شمال ) ، تغییر در سرعت ( سرعت و جهت حرکت ) و تغییر جهت آن ( چرخش حول یک محور ) را تشخیص دهد. این کار، با اندازه گیری شتاب خطی و سرعت زاویه ای اِعمال شده به سیستم انجام می گیرد. این سامانه، از آن جایی که به هیچ مرجع خارجی نیاز ندارد ( پس از مقداردهی اولیه ) ، از پارازیت و فریب مصون است.




wiki: سامانه ناوبری اینرسیایی